大家都在搜:斜掛升降機 無障礙升降機 殘疾人升降機 斜掛升降平臺
0531-81172188


一、概述
斜掛式輪椅升降平臺,一種安裝在樓道系統利用電機牽引沿著軌道上下移動并運載乘客的無障礙安全裝置。它由驅動系統、導軌、繩輪鏈、移動平臺等組成。用于建筑樓道系統中,乘坐輪椅或爬樓梯困難的人員攀爬樓梯的專用設備。主要由主驅動系統,輔助驅動系統、主控系統和安全系統組成。
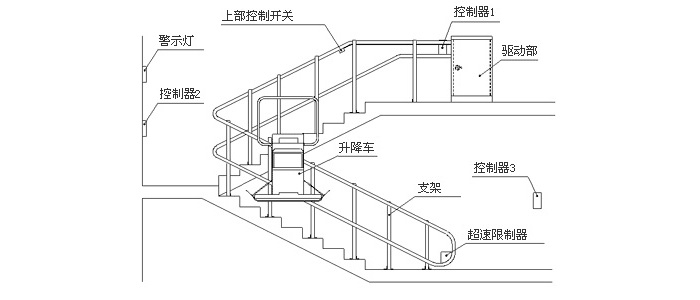
斜掛式輪椅升降平臺主要為使用輪椅者提供上下樓梯的服務,其一般結構型式如下圖所示。為了防止平臺傾翻,設2根導軌。斜掛式輪椅升降平臺主要由工作平臺、支承架、護欄組成,主體是鋼結構。工作平臺是升降機的工作部分,表面復有防滑材料。平臺的3個外向面都安裝有安全護板,當平臺運動受阻時,能使升降機停止運動。平臺在不使用時可以向上折疊,以減少占用空間。
二、基本功能
+ 全自動運行:無需人工干預,自動折疊、歸位。
+ 手控操作系統:手動控制切換開關,可以手動控制平臺輔助驅動系統動作。
+ 運行警示,設有聲音和燈光兩種警示方式。
+ 自動加減速:平臺即將遠離/到達著陸點時,自動加/減速。
+ 自檢系統
+ 智能充電
+ 非正常操作不能運行
+ 安全踏板及安全圍欄不到位不能運行
+ 非接觸式及接觸式感應障礙物提前停止運行,障礙物移開自動繼續運行。
+ 平臺異常運行保護裝置(安全保護系統)
+ 極限限位自動停止運行保護裝置
+ 過電繼電保護裝置
+ 運行中緊急停止裝置
+ 可與外部火警或警報系統聯動
+ 主踏板平臺防滑花紋與噴漆,防滑系數不低于0.85
+ 操作簡便
+ 智能無級變速
+ 適用性廣泛
+ 遠程遙控器控制
三、平臺主要技術參數
| 標準載人平臺尺寸 | 1000毫米×700毫米(非標平臺尺寸) |
| 額定負載 | 250公斤 |
| 速度 | 0~7M/MIN 離開或達到樓梯平臺時減速 |
| 驅動系統 | 1.5KW-VVVF緊湊型驅動系統 |
| 導軌 | 獨立驅動系統與軌道成整體,導軌及立柱材質均采用不銹鋼 |
| 電源 | AC 220/380V 50Hz-60Hz、15A |
| 通信 | 載波通信 |
| 載人平臺操作系統控制 | 無鎖恒壓方向按鈕開關,DC24V,裝有急停開關 |
| 呼叫站操作控制 | 無鎖恒壓平臺運行方向開關;載人平臺收、放恒壓開關;電源鎖,DC24V |
| 表面涂層 | 經久耐用的靜電噴塑及烤漆、海灰色涂料、不銹鋼打磨以及標準顏色可以自由選擇 |
| 彎曲的安全臂 | 全自動安全臂安裝在平臺上部880毫米處 |
| 步行者安全警示燈 | 安裝在平臺地板前后兩端,琥珀色發光燈管 |
| 超速安全裝置 | 安裝在導軌底部,含有機械超速傳感器和制動閘,電子驅動斷流保護器 |
| 遇障礙即停 | 載人平臺底部和坡板的安全感應板可以探測障礙物,如遇障礙即令平臺停止運行 |
| 手動切換鍵 | 緊急情況時可以手動下降平臺和折疊載人平臺 |
| 驅動系統 | 繩輪鏈驅動系統 |
| 導向系統 | 模塊式軌道系統 |
| 控制系統 | PLC控制 |
| 過載保護 | 過電流繼電器控制 |
| 護板形式 | 翻板(三側安裝、兩邊自動) |
| 緊急停止 | 按下緊急按紐開關可控制機器運行 |
| 安全聯鎖 | 平臺異常不能使用、安全防護不到位不能運行。 |
| 安全觸板 | 運行中安全觸板遇障礙物,運行立即停止 |
| 斷電控制 | 無電或故障時,手動控制收起平臺 |
| 安全翹板 | 上升時翹起 |
| 感知面與感知邊 | 底板,主體,側板安全傳感器、用以感知障礙物 |
| 限速控制 | 智能變頻控制,啟動低速,直線加速,轉彎減速 |
| 安全鎖匙 | 專用鑰匙控制,專人專管 |
| 牽引方式 | 繩輪鏈驅動,并為上導軌開槽。 |
| 安全保護系統 | 獨立的安全保護系統 |
| 動力機構 | 獨立 |
| 操作 | 獨立操作鑰匙,開啟平臺控制柜內穩壓開關和呼叫站著陸開關 |
| 靠位置、停放位置 | 低位 |
| 暫停按鍵 | 在設備各停靠點以及平臺上均配有暫停按鍵,配有步行者安全警示燈 |
| 非接觸式感應器探測運行方障礙物 | 載人平臺配有紅外線感應器探測運行方障礙物,如遇障礙平臺停止運行 |
| 手控系統 | 緊急情況時可以手動下降和折疊載人平臺 |
| 報警裝置 | 配有緊急呼叫幫助按鈕、不同情況不同聲音報警 |
| 無線遙控器 | 在緊急情況或操作人員控制時使用 |
| 外觀顏色 | 銀色/客戶可自定選擇 |
| 端站指示燈 | 配有運行、檢修及平臺運行指示燈 |
| 可折疊座椅 | 配有安全帶和氣動彈簧自動收起 |
四、斜掛式無障礙升降平臺工作原理
斜掛式無障礙輪椅升降平臺主要采用PLC和變頻調速器控制方式進行控制。PLC收集信息并處理之后發出指令,變頻調速器根據PLC指令來控制電動機的運轉機器速度。
PLC工作原理
可編程控制器,英文稱ProgrammableLogicController,簡稱PLC。PLC是基于電子計算機,且適用于工業現場工作的電控制器。它源于繼電控制裝置,但它不像繼電裝置那樣,通過電路的物理過程實現控制,而主要靠運行存儲于PLC內存中的程序,進行入出信息變換實現控制。
PLC采用“順序掃描,不斷循環”的工作方式
1.每次掃描過程,集中采集輸入信號,集中對輸出信號進行刷新。
2.輸入刷新過程,當輸入端口關閉時,程序在進行執行階段時,輸入端有新狀態,新狀態不能被讀入。只有程序進行下一次掃描時,新狀態才被讀入。
3.一個掃描周期分為輸入采樣,程序執行,輸出刷新。
4.元件映象寄存器的內容是隨著程序的執行變化而變化的。
5.掃描周期的長短由三條決定。
(1)CPU執行指令的速度
(2)指令本身占有的時間
(3)指令條數,現在的PLC掃描速度都是非常快的。
變頻調速器工作原理
主電路是給異步電動機提供調壓調頻電源的電力變換部分,變頻器的主電路大體上可分為兩類:電壓型是將電壓源的直流變換為交流的變頻器,直流回路的濾波是電容。電流型是將電流源的直流變換為交流的變頻器,其直流回路濾波是電感。 它由三部分構成,將工頻電源變換為直流功率的“整流器”,吸收在變流器和逆變器產生的電壓脈動的“平波回路”,以及將直流功率變換為交流功率的“逆變器”。
整流器
最近大量使用的是二極管的變流器,它把工頻電源變換為直流電源。也可用兩組晶體管變流器構成可逆變流器,由于其功率方向可逆,可以進行再生運轉。
平波回路
在整流器整流后的直流電壓中,含有電源6倍頻率的脈動電壓,此外逆變器產生的脈動電流也使直流電壓變動。為了抑制電壓波動,采用電感和電容吸收脈動電壓(電流)。裝置容量小時,如果電源和主電路構成器件有余量,可以省去電感采用簡單的平波回路。
逆變器
同整流器相反,逆變器是將直流功率變換為所要求頻率的交流功率,以所確定的時間使6個開關器件導通、關斷就可以得到3相交流輸出。以電壓型pwm逆變器為例示出開關時間和電壓波形。
控制電路
是給異步電動機供電(電壓、頻率可調)的主電路提供控制信號的回路,它有頻率、電壓的“運算電路”,主電路的“電壓、電流檢測電路”,電動機的“速度檢測電路”,將運算電路的控制信號進行放大的“驅動電路”,以及逆變器和電動機的“保護電路”組成。
(1)運算電路:將外部的速度、轉矩等指令同檢測電路的電流、電壓信號進行比較運算,決定逆變器的輸出電壓、頻率。
(2)電壓、電流檢測電路:與主回路電位隔離檢測電壓、電流等。
(3)驅動電路:驅動主電路器件的電路。它與控制電路隔離使主電路器件導通、關斷。
(4)速度檢測電路:以裝在異步電動機軸機上的速度檢測器的信號為速度信號,送入運算回路,根據指令和運算可使電動機按指令速度運轉。
(5)保護電路:檢測主電路的電壓、電流等,當發生過載或過電壓等異常時,為了防止逆變器和異步電動機損壞,使逆變器停止工作或抑制電壓、電流值。
五、結構圖

銷售電話:13296419226

銷售電話:13296419226

銷售電話:13296419226

銷售電話:13296419226

銷售電話:13296419226

銷售電話:13296419226

 超易達機械微信
超易達機械微信




 網址二維碼
網址二維碼